本文最后更新于:2020年1月8日 凌晨
理论计算
Bresenhan算法将坐标系分割成棋盘形状,每个像素占有一个棋格,当我们进行采样时(直线斜率小于1),如下图所示,假设给定绘图的起始点为(10,11),那么绘制下一个采样点的坐标必然是从(11,11)和(11,12)中选择一个。如果把这种情况一般化,对于绘制直线的起始点是(Xk,Yk),那么其下一个采样点必然是(Xk+1,Yk)或者(Xk+1,Yk+1)中的一个。
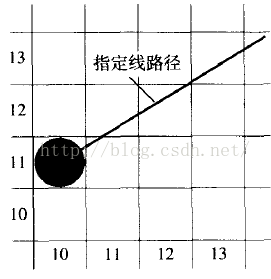
那么该选择这两点中的哪一个点呢?选择更接近理论线路径的那个点。
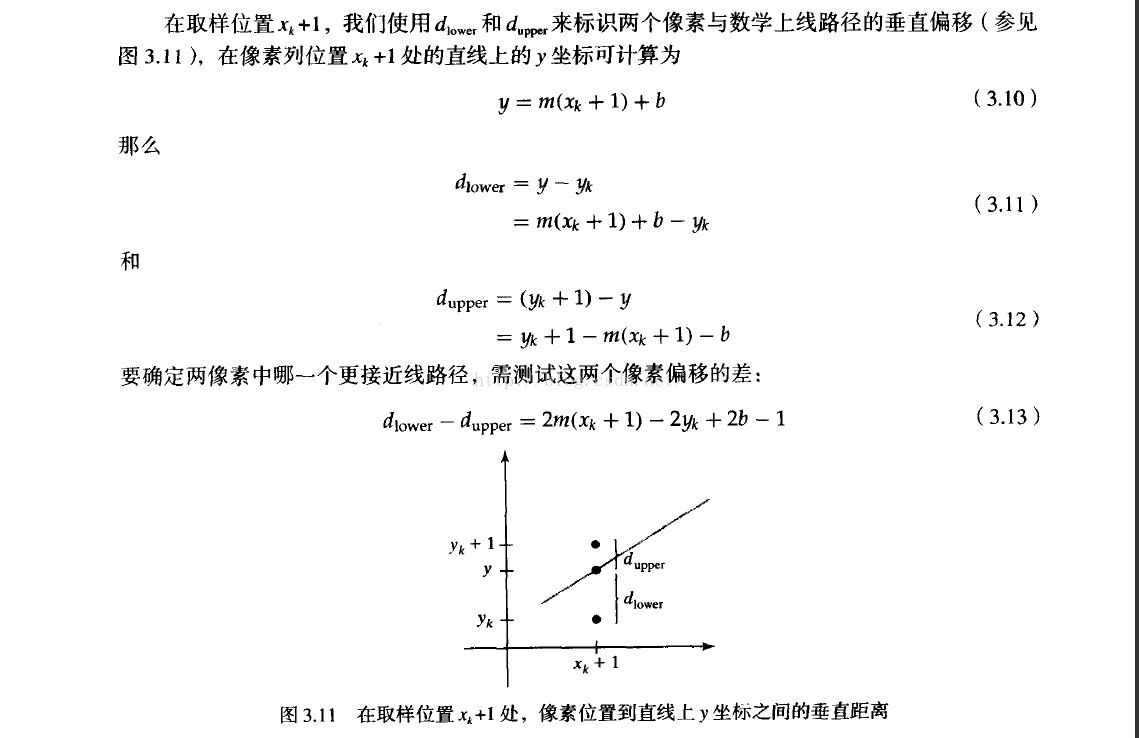
想要得到3.16表达式,需要将yk=m*xk+b(一般直线方程)带入式3.14中,而且应该注意△y和△x都是常量,△y为给定的起始点和终点的纵坐标差的绝对值,△x为给定的起始点和终点的横坐标的差的绝对值。
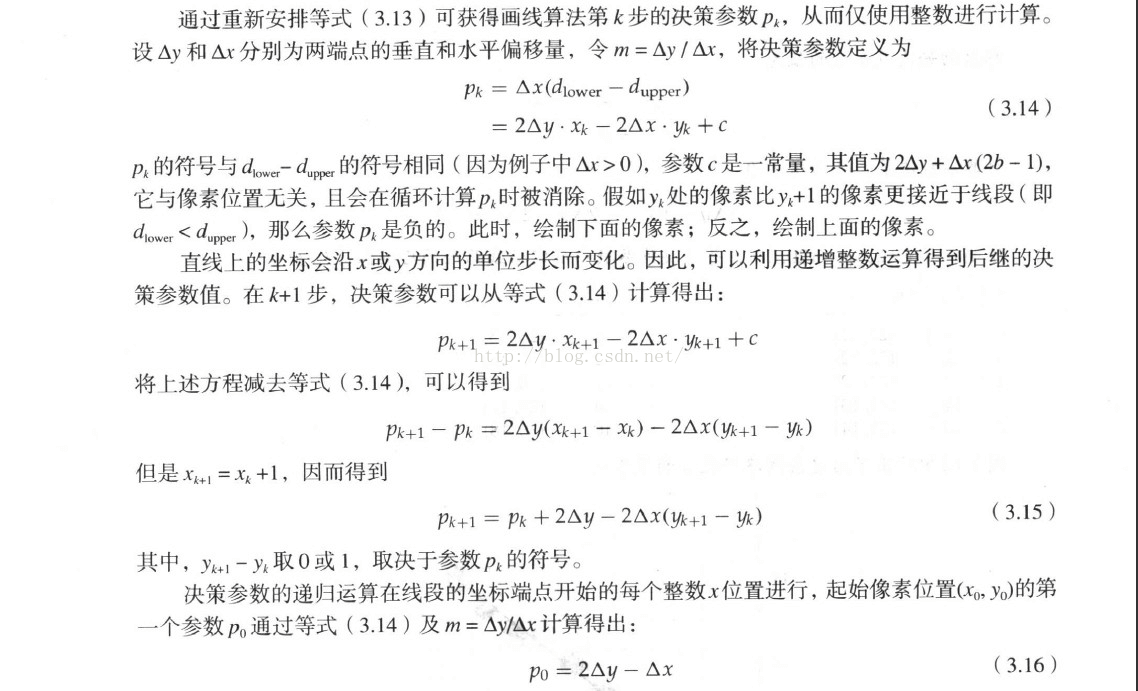
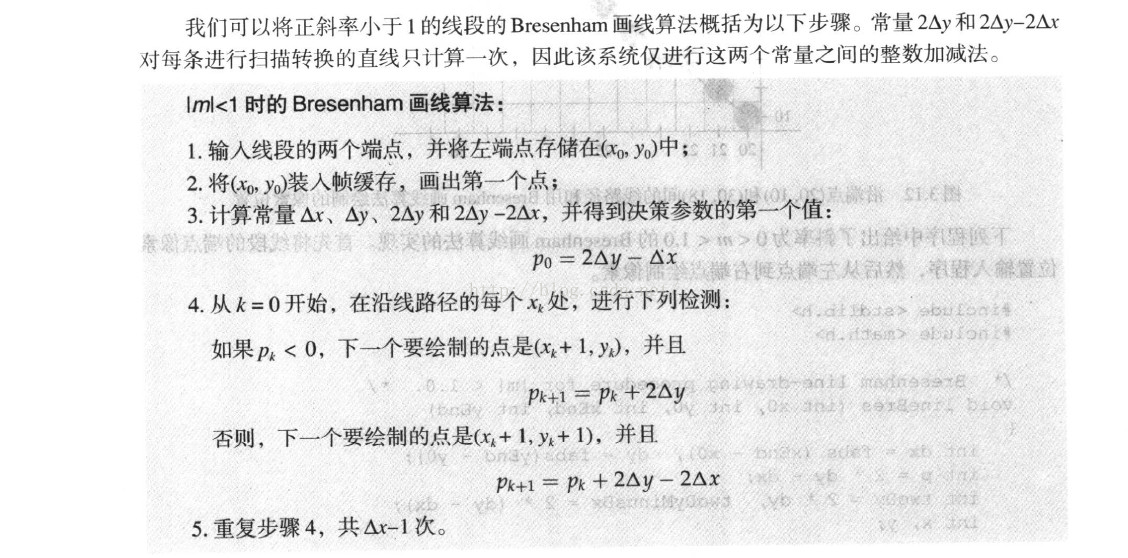
注意:文中所说的p0是已经根据运动起点计算出的p值,它决定的是实际第一步的运动方向。许多文章也叫p1。
这里的△x实际是运动长度最长的那个轴总长度作为横坐标(上述默认X轴移动最长),△y是我们当前要移动的轴总长度,p也是依赖于当前轴的(上面默认p0 = py,实际还有px)
上图中是首先计算出p0,再判断p0决定第一步该怎么走,再对p进行计算,再判断,如此循环。注意这个判断和计算顺序。
代码实现
实际代码如下:
- 我们不知道那个是最长轴,则p
0是随着轴变化的,每个轴都需要单独计算
- 默认 xEnd > x0,yEnd > y0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
|
void lineBresenham(int x,int y,int xEnd,int yEnd)
{
int dx=xEnd-x0,dy=yEnd-y0;
int dm = max(dx,dy)
int px=2*dx-dm;
int py=2*dy-dm;
int counter = 0;
SetPixel(x,y);
while (counter<dm)
{
if(px>0){
x++;
px+=2*dx-2*dm;
}
else
px+=2*dx;
if(py>0){
y++;
p+=2*dy-2*dm;
}
else
py+=2*dy;
counter ++;
SetPixel(x,y);
}
}
|
不知道你有没有发现无论p是正负,都需要计算 pk+1 = pk +Δy,只有在pk >0时,才再减去Δx。
但是再程序上你没法将它提取出来,这就很尴尬。而且若是提取出来只能放在 if 语句之前,那么问题来了,咋搞?
仔细分析你会发现问题出来p0上,因为我们在设置p0变量时就已经根据初始位置进行了一次预计算。如果我们这里将p0在往前推一次,你会发现一个很神奇的现象
- p
-1 = dm,它不依赖当前轴,即所有轴的p-1相同
然后将p0的计算并入到while循环中,此时再将上述程序优化
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
|
void lineBresenham(int x,int y,int xEnd,int yEnd)
{
int dx=xEnd-x0,dy=yEnd-y0;
int dm = max(dx,dy)
int px = py =-dm
int counter = 0;
SetPixel(x,y);
while (counter<dm)
{
px+ = 2*dx
if(px>0){
x++;
px- = 2*dm;
}
py+ = 2*dy
if(py>0){
y++;
py- = 2*dm;
}
counter ++;
SetPixel(x,y);
}
}
|
你会发现效果一样,只是更改了p0的计算位置,我们就可以将程序优化一部分。
再进一步变换一下想法,为了减少计算量,我们将所有的公式左右两边都除以2。则
令p0 = 1/2p0,并不影响正负值判断。则:
p-1 =1/2Δx
pk <0:pk+1 = pk +Δy
pk >0:pk+1 = pk +Δy - Δx
到这里其实就和Marlin的程序基本是一致的了。
下面是Marlin的源程序,简化了一些并加了注释
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
| void Stepper::isr() {
counter_X = counter_Y = counter_Z = counter_E = -(current_block->step_event_count >> 1);
step_events_completed = 0;
bool all_steps_done = false;
#define _COUNTER(AXIS) counter_## AXIS
#define _APPLY_STEP(AXIS) AXIS ##_APPLY_STEP
#define _INVERT_STEP_PIN(AXIS) INVERT_## AXIS ##_STEP_PIN
#define PULSE_START(AXIS) \
_COUNTER(AXIS) += current_block->steps[_AXIS(AXIS)]; \
if (_COUNTER(AXIS) > 0) { _APPLY_STEP(AXIS)(!_INVERT_STEP_PIN(AXIS),0); }
#define PULSE_STOP(AXIS) \
if (_COUNTER(AXIS) > 0) { \
_COUNTER(AXIS) -= current_block->step_event_count; \
_APPLY_STEP(AXIS)(_INVERT_STEP_PIN(AXIS),0); \
}
PULSE_START(X);
PULSE_START(Y);
PULSE_START(Z);
PULSE_START(E);
DELAY_NOPS(EXTRA_CYCLES_XYZE);
PULSE_STOP(X);
...
if (++step_events_completed >= current_block->step_event_count) {
all_steps_done = true;
break;
}
}
|
参考文档